Waking up my NAS remotely using Tailscale
2023 Aug 28
Introduction
I recently bought a NAS (a TerraMaster F4-423 if you’re curious). My main uses cases for it are: Plex media server, Samba share, Resilio Sync target. I wanted all that to be accessible from anywhere so I installed Tailscale on the NAS and made it join my tailnet.
This is a great setup: the NAS is quite powerful, has room for a lot of disk capacity and thanks to Tailscale I can access it remotely.
My initial plan was to have it always on, however after a couple of weeks that changed because the HDDs were too loud and unfortunately the NAS sits in my work office.
I started to look into shutting it down and waking it up on demand; I vaguely knew about Wake-on-LAN (abbreviated to WoL in the rest of the article) but I wasn’t sure if it would work correctly with this device.
So I started experimenting a bit with it and everything worked fine. Now that I knew I could boot it up reliably with WoL I started to think about how I could boot it up remotely and how I could make the user experience the simplest it could be.
The rest of this post will explain in details what I ended up with and how it’s implemented.
The goal
I had to accept that syncing with Resilio wouldn’t be instantaneous anymore since I have to first boot up the NAS, however for Plex and my Samba share there would be little to no impact because of how infrequently I use them.
However, I almost exclusively use Plex with my Apple TV and when that happens, I’m sitting on my couch. Now, I may be lazy but when I’m ready to watch a movie I don’t want an initial setup step where I have to pull out my laptop, open a terminal and run a command line tool.
So I thought about a UI that I could open on my phone, click a button and be done with it.
That was the goal: something dead simple with two buttons, one to boot up the NAS, one to shut it down.
What I implemented
Let’s start with the UI. Here’s a screenshot of the only page there is:
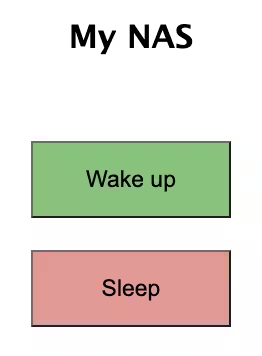
As I said before, dead simple. The “Wake up” button wakes up the NAS, the “Sleep” button tells the NAS to shut down.
There are three components to make this work:
- a service listening on the NAS accepting shutdown requests
- a service listening on another device accepting wake up requests
- a service serving the UI
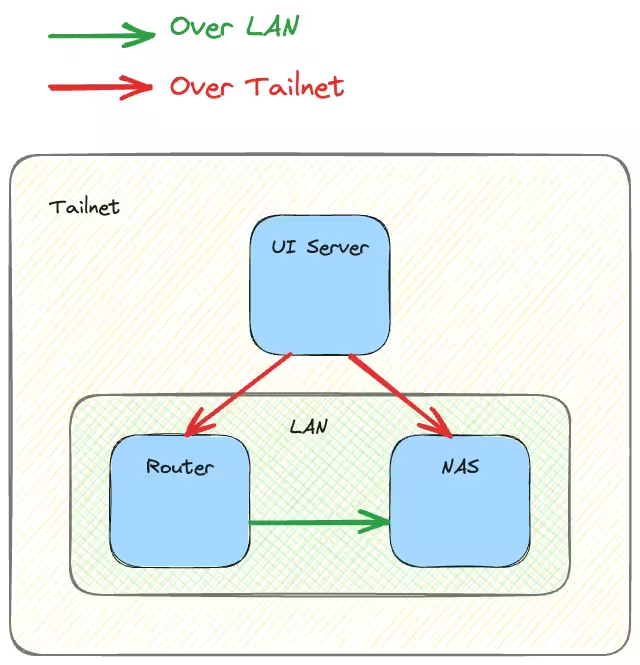
The other device responsible for waking up the NAS must be on the same LAN for WoL to work. In my case this device is a router running Linux.
These services need a way to communicate to each other, and this is where Tailscale comes in. All my devices join a single tailnet and can then talk to each other. We’ll go into details about this later on.
The following diagram shows the communication links:
The magic
Tailscale is the magic component that made this setup trivial to implement. With the MagicDNS feature, every device in my tailnet is reachable via its name and the great thing is that it just works on both Linux, macOS and my iPhone. When my device named “router” joins my tailnet, I can then resolve its IP on any device in the tailnet by just using its name.
This might not seem like much but this means that I don’t have to maintain a nameserver myself and I can just hardcode the name in my service code.
Now, I could have just made my services listen on their respective device’s IP but I was inspired by this blog post from Tailscale which explains how to build a private service with its own IP and name and everything. This uses the tsnet Go library.
I ran with this idea and made each of the three components I described earlier a private service, with its own name:
- the waker which handles wake up requests
- the sleeper which handles shutdown requests
- the ui which serves the UI shown before and dispatch requests to both the waker and sleeper
Now that we know how services communicate with each other, let’s update the previous diagram to make it more accurate:
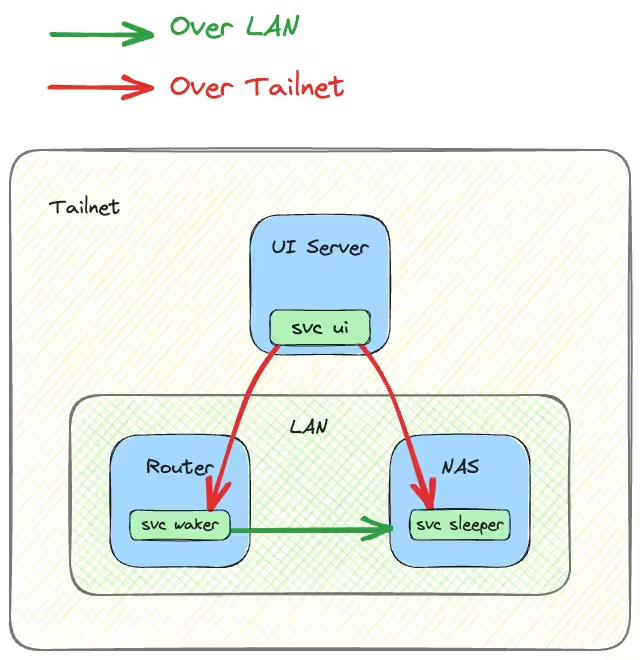
Notice that services now talk directly to each other except for the waker service, that’s because it sends a WoL packet which is actually received by the NAS itself and not by any service I wrote.
Ok, we know what each service should do and how they communicate to each other to do their job: let’s take a deeper look into the actual wake up and shutdown requests.
The wake up and shutdown requests
Both requests are actually really simple to implement.
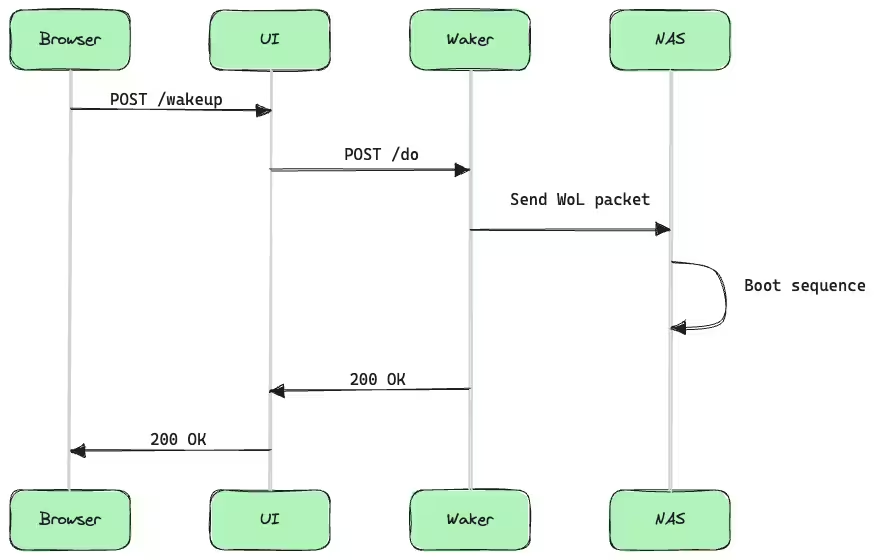
When I’m asking to wake up the NAS the waker service will send a WoL packet to the MAC address of the NAS. The following sequence diagram shows the flow:
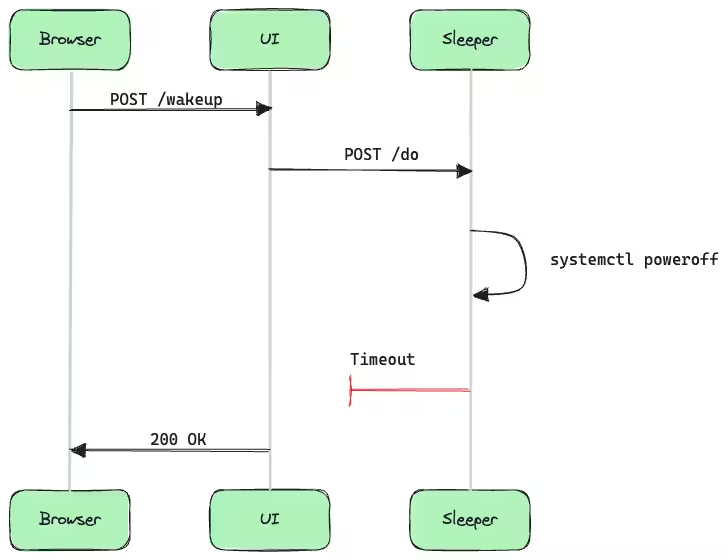
When I’m asking to shut down the NAS the sleeper service will just run systemctl poweroff. This has the unfortunate side effect that the request will timeout on the UI side but I can live with that. The following sequence diagram shows the flow:
Conclusion
This was a fun afternoon project. The code is open source and available on GitHub.
There are around 500 lines of Go, HTML and CSS code in there; it should be easy to adapt to your use case if needed.
There are some considerations that I haven’t mentioned, like how to reliably start the services at boot time, how to expose the UI to the internet if necessary, etc. This highly depends on the environment in which this system is deployed and is left as an exercise to the reader.
As for me, I have this system deployed for about a month now and I’m quite happy with it.